3. Gyroskop; vlastní blok s parametrem
V programovatelném hubu stavebnice Lego Education Spike Prime je vestavěný gyroskop. Jde o senzor pro měření náklonu. Dokáže měřit 3 různé druhy náklonů, v Lego Spike jsou pojmenovány podle 3D pohybů letadel: ROLL, YAW a PITCH.
ROLL
Pohyb, při kterém se levá a pravá strana pohybuje nahoru a dolů.
.png)
YAW
Pohyb doleva nebo doprava
.png)
PITCH
Pohyb, při kterém jde přední a zadní část nahoru a dolů.
.png)
Náš robot jezdí na ploché vodorovné podložce. Naměřená data z YAW můžeme použít v našich programech k ovládání robota. Například při jízdě rovně nebo zatáčení. YAW může nabývat hodnot od 0 do 180 stupňů při zatáčení vpravo nebo od 0 do -180 stupňů při zatáčení vlevo.
.png)
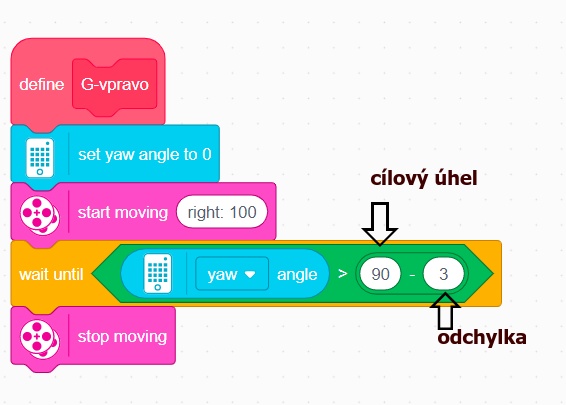
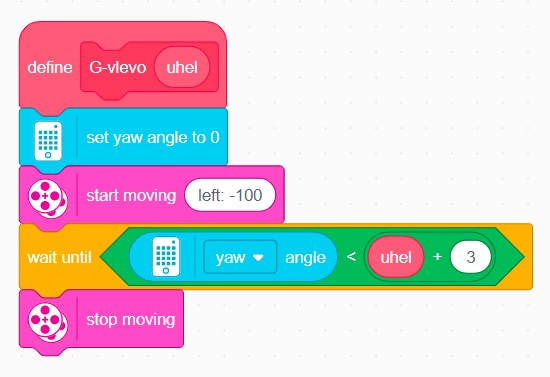
Úkol 1
Vytvořte vlastní blok G-vpravo, kterým pomocí gyroskopu otočíme našeho robota na místě o úhel 90° vpravo.
Jak na to?
- Nastavíme úhel YAW na 0
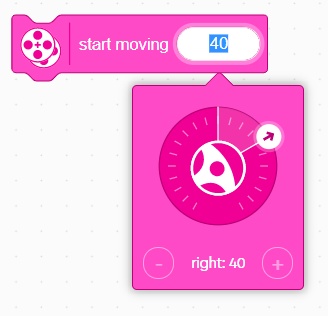
- Spustíme pohyb, kterým se robot otáčí doprava na místě.
- Čekáme, dokud nenastane, že úhel yaw naměřený gyroskopem bude větší než 90 stupňů.
- Zastavíme pohyb.
Po zastavení si zkontrolujeme, jaký úhel yaw gyroskop ukazuje. Zjistíme, že v závislosti na rychlosti pohybu a na setrvačnosti robota bude výsledný úhel větší než 90°, a proto budeme muset v našem příkazu zastavit otáčení dřív – od cílového úhlu odečteme naši (experimentem zjištěnou) odchylku např. 3°.
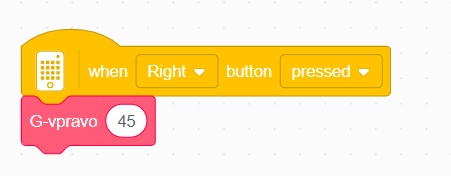
Úkol 2
Upravte vlastní blok G-vpravo, tak abychom zatočili o jiný úhel (např. o 120° vpravo).
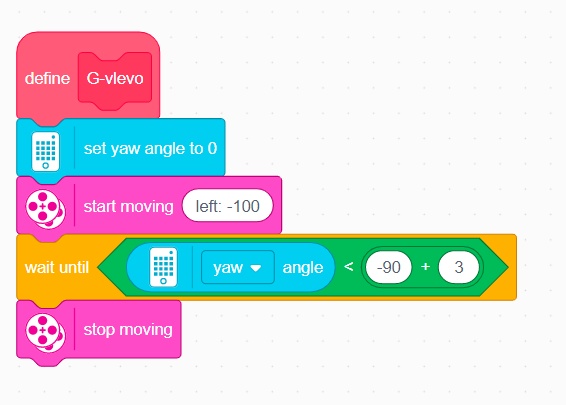
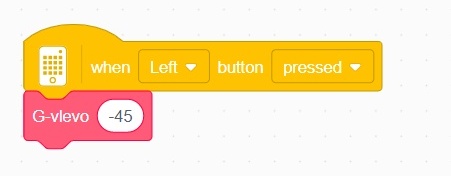
Úkol 3
Vytvořte vlastní blok G-vlevo, kterým pomocí gyroskopu otočíme našeho robota na místě o úhel -90° vlevo. (Stačí zkopírovat a náležitě upravit odladěný kód pro zatáčku vpravo.)
Úkol 4
Upravte vlastní blok G-vlevo, tak abychom zatočili o jiný úhel (např. o -120° vlevo).
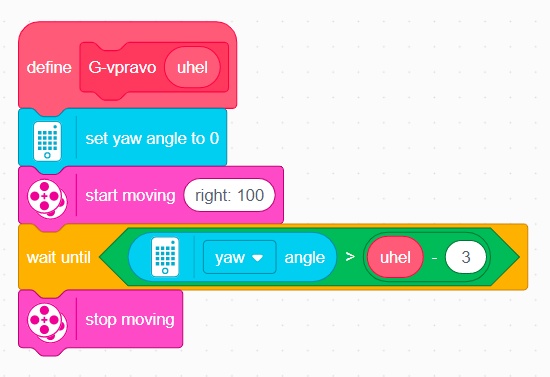
Úkol 5
Přidejte k vlastnímu bloku G-vpravo parametr úhel, abychom tento kód mohli použít pro zatáčku vpravo o zvolený úhel (od 0 do 180 stupňů).
Úkol 6
Přidejte k vlastnímu bloku G-vlevo parametr úhel, abychom tento kód mohli použít pro zatáčku vlevo o zvolený úhel (od 0 do -180 stupňů).
Žáky vedeme k tomu, aby všechny vytvářené příkazy vždy postupně řádně testovali:
Využití našich příkazů:
Naprogramuj robota pro jízdu do čtverce, do rovnostranného trojúhelníku, do pravidelného šestiúhelníku, osmiúhelníku…
Uprav v našich blocích G-vpravo a G-vlevo parametr v pohybovém bloku „start moving“ pro jízdu po kružnici a nauč robota jezdit „obloučkový slalom“. Nezapomeň takto upravený příkaz nejprve znovu otestovat a v případě potřeby v něm doladit výše zmiňovanou „odchylku“.
Mgr. Hana Vaňková, vyučující INF v 8. ročníku